Project Overview
Full Project Title
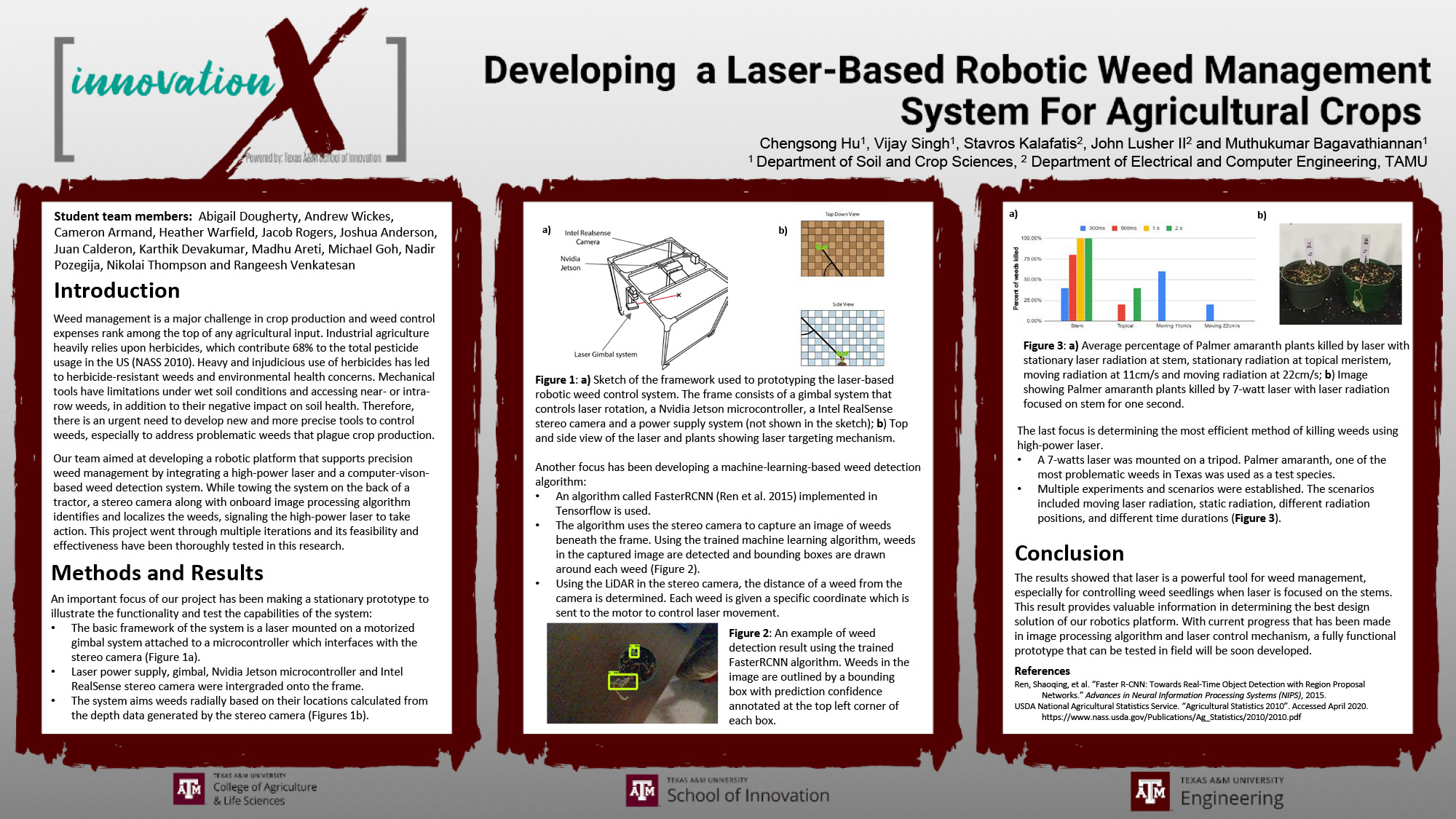
Developing a Laser-Based Robotic Weed Management System for Agricultural Crops
Background
Weeds are the major pests of crop fields and herbicides have been the most preferred tool for weed management. Along with the benefits of herbicides, comes the drawbacks such as contamination of water bodies (Hallberg 1987) and residues in food produces (Zilberman et al. 1991).
These health and environmental concerns have promoted organic farming as an alternative agricultural system. Organic crop acreage has increased to 5.0 million from 1.3 million between 2002 and 2016 (USDA-NAAS 2017). However, organic culture has many challenges regarding pest management, which needs to be addressed.
A survey conducted by the United States Department of Agriculture in 2014 had identified weed management among the top challenges facing organic farming, and insufficient weed control options is a commonly cited reason behind slow adoption of organic agriculture in the U.S. (McBride and Greene 2015).
Lasers have been suggested as a useful non-chemical weed control tool under laboratory conditions (Methiassen et al. 2006). However, killing several weed plants with a single laser is not feasible under field applications and improvements are necessary in this regard.
Projected Goals
The overall goal of this project is to design a laser-based weed control system by utilizing machine learning-based algorithms to detect weed plants, make real-time weed management decisions on pre-established criteria, and execute precision laser applications using a robotic platform. The major objectives of the proposed research are to 1) evaluate and standardize lasers for weed control under field conditions, and 2) develop and test a robotic laser system prototype for automation of weed control in row crops. This project will involve students/researchers from different departments across Texas A&M University, including the Department of Soil and Crop Sciences and Electrical and Electronics Engineering, with specialization in areas such as weed science, plant physiology, computer science, programming, image analysis, robotics and hardware engineering.
We conducted a preliminary study during fall 2018 on evaluation of the impact of laser exposure timings on eight different weed species (broadleaves and grass weeds) during the fall of 2018, in collaboration with a group of four undergraduate engineering students as a semester-long capstone project. Plants were grown in a greenhouse and were exposed to a red laser beam (2.5 W) at 2-to 3-leaf stage (5-10 cm tall) for 3 and 5 secs. We observed that laser exposure of 2-3 secs was sufficient to kill grass weeds. However, broadleaf weeds could be controlled only at 5 secs. Some of the weeds, such as giant ragweed (Ambrosia trifida) could not be controlled even at 5 secs exposure. Differential response of different weeds has suggested that we need to test high powered (>5 W) lasers for broadcast exposure to control all types of weed species.
This small preliminary study conducted this past fall has allowed us to understand the potentials and limitations of laser-based weed control and provided us directions as to what the focal areas should be. It also allowed us to experiment and be comfortable with the system. We developed this Innovation [X] proposal to test the hypotheses we developed during this past fall in order to generate robust preliminary data, which will be instrumental for federally-competitive grants.
Within the scope of this Innovation [X] grant, we will specifically focus on the following improvements: 1) safe integration of high-powered lasers in the subsystem, 2) use of real-time weed tracking system instead of image-based classification, 3) increasing the computing power of the system, 4) integration of multiple lasers in the system for uniform coverage, and 5) develop a prototype robotic platform for effective delivery of the laser system. These improvements will be vital to convince federal funding agencies in order to develop a robust laser system with field applications.
Projected Outcomes
The proposed research project has tremendous national and international importance, especially in organic agricultural systems as well as in conventional systems where proliferation of herbicide resistant weeds is an emerging concern. It is anticipated that this work would gain enormous national and international attention, with great opportunities for IP generation and commercial applications down the road. We anticipate that the project will produce at least one patent application and two peer-reviewed international journal articles. Additionally, the robust set of preliminary data expected to be collected from this research will pave the way for further research supported by federal grant funds.
Results
Meet The Team
Team Leaders
- Dr. Muthukumar Bagavathiannan, Assistant Professor (Weed Science), Department of Soil and Crop Sciences, College of Agriculture and Life Sciences; muthu@tamu.edu; (979) 845-5375(979) 845-5375
- Dr. Vijay Singh, Assistant Research Scientist (Weed Science), Department of Soil and Crop Sciences, College of Agriculture and Life Sciences
- Prof. Stavros Kalafatis, Professor of Practice, Department of Electrical and Computer Engineering, College of Engineering
- Dr. John Lusher II, Associate Professor of Practice, Department of Electrical and Computer Engineering, College of Engineering
Team Contributors
- Faculty from College of Engineering and College of Agriculture and Life Sciences
Graduate Student Team Members
- Madhu Areti, Mechanical Engineering, College of Engineering
- Rangeesh Venkatesan, Mechanical Engineering, College of Engineering
- Heather Warfield, Environmental Health, School of Public Health
Undergraduate Student Team Members
- Joshua Anderson, Computer Engineering, College of Engineering (Spring 2020)
- Cameron Armand, Electrical Engineering, College of Engineering (Spring 2020)
- Juan Calderon, Mechanical Engineering, College of Engineering
- Karthik Devakumar, Electrical Engineering, College of Engineering (Fall 2019)
- Abigail Dougherty, Computer Engineering, College of Engineering (Spring 2020)
- Michael Goh, Electrical Engineering, College of Engineering (Spring 2020)
- Nadir Pozegija, Electrical Engineering, College of Engineering (Fall 2019)
- Jacob Rogers, Electrical Engineering, College of Engineering (Fall 2019)
- Nikolai Thompson, Computer Science, College of Engineering
- Andrew Wickes, Electrical Engineering, College of Engineering (Fall 2019)
Units Represented
- College of Agriculture and Life Sciences
- College of Engineering